
https://www.youtube.com/watch?v=F0wJofBFWLI
2024-08-31 23:19:48
Open AI's NEW Physical ROBOT Shocks The Entire INDUSTRY (GPT -5 WITH BODY!) (FINALLY HERE!)

So today , we finally got the long awaited demo from the brilliant minds at 1x robotics , a company focused on physical embodiment for AGI and one that is backed by the infamous OpenAI .
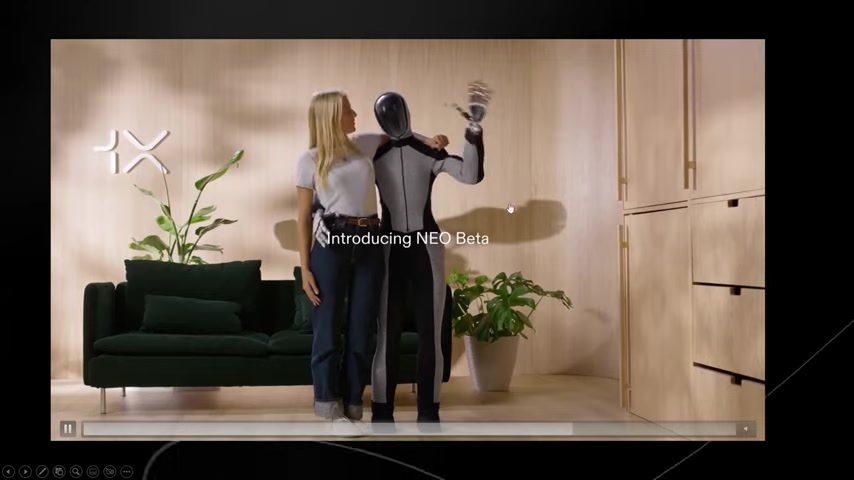
So what you're about to see is the one x Neo Beta .
It's gonna be a 32nd clip that allows you to visualize not only how advanced this robot truly is in terms of its movement and agility , but what the future of humanoid robotics is going to look like .
Yeah .

So there you have it .
The first 30 seconds that I think truly shows us what the future might look like in terms of humanoid robotics .
The reason that I believe this demo is probably one of the most outstanding demos I've seen in my entirety of robotics so far is because of the fluidity of this robot .
Namely , one of the first things that I've seen many individuals on Twitter actively discussing is the fact that this robot is arguably one of the only ones where many people are debating whether or not it's actually a human inside the suit .
And I would say that that is most likely the biggest compliment that you could probably get for someone who works at 1x robotics .
Because if people are discussing how much this looks like a human to the point where they don't even believe that it's a robot , I would say that they've done a completely fantastic job .

So so one of the things that we do have to take a look at from this demo is , of course , this first part .
So what we can see here is that Neo patiently waits for the woman to actually finish tying her shoelaces .
And then , I think one of the most impressive things that I actually haven't seen any other humanoid robot companies do this successfully yet , which goes to show that this robot is actually , arguably , rather a little bit more advanced than anything I've seen on the current market .
But we can see that this robot manages to successfully bend over and then , of course , pick up an item quite like how a human would .

Now I know many people might think , okay , and I even saw this comment a few times on Twitter that this task is quite useless , but you have to remember that these humanoid robots are going to be helping out millions and millions of people , especially those who are quite elderly , whose hips aren't exactly in the best position to be doing this kind of movement .
Considering the joints , as you get older and your movement is quite reduced , they tend to fail more often .
Now what we also see at this moment is we also see the fluidity of the robot in terms of the humanoid movement , and it's remarkably effective at demonstrating how agile the robot is considering the fact that this is an all one time speed .
Now the reason I bring up the fact that this is in one time speed is because throughout numerous demos that are demonstrated to us , we often see that in the top right hand side , there is usually a , you know , 10 times speed or a 5 times speed .
And this is usually because robots are usually quite slow to move considering the fact that they do suffer from the fact that they aren't as agile as humans are just simply because making robots that are that fast is something that is incredibly hard considering the physical limits of certain robots .
So this is remarkable considering how human and how fluid and how fast these movements are , which brings the first real shock to show us , okay , this is going to be most likely how future robots are going to be operating in terms of their fluid .
Now I think that what one x robotics have done here with their aim , which is to , of course , utilize the complex system of bio inspired actuators , mimicking human muscles for a level of dexterity and precision that we've simply never seen before is just remarkably , you know , accurate .

And I think what we can also see here as well is that we can see that Nio's vision system works rather well in order to attract this individual as they manage to walk away .
We can see that Nio manages to look around .
Although , yes , we will get more information , but on closer inspection , if you do look right here , we can see that there does seem to be around 2 cameras that Nio is likely using for advanced vision and sensing .
Now one of the features that you may have overlooked is as Nio comes towards this person .
So as the woman returns , Neo smoothly extends his arm for a hug , and this gesture may seem simple , but it actually demonstrates the incredible safety features built into Neo's design .
His compliant soft exterior ensures a gentle touch even if he were to accidentally bump into someone .
And this robot is basically designed for a harmonious coexistence with humans and not dominance .

Now this wasn't the only demo that they did show us for Neo .
They also showed us another demo in a different environment that shows us just how incredible Neo is at adapting to other scenarios .
Right here , what you're about to see is this kitchen scenario with Nio .
So what we can see here is the one x robotics Nio gracefully navigating a kitchen dishwasher and , of course , unloading the dishwasher with smooth fashion .
Now what we need to notice here is Nio's actual precision when completing these tasks .
When Nio is grabbing the glasses and when he actually grabs the cabinet doors , we can see that there is a really nice level of precision that leads to full task completion .
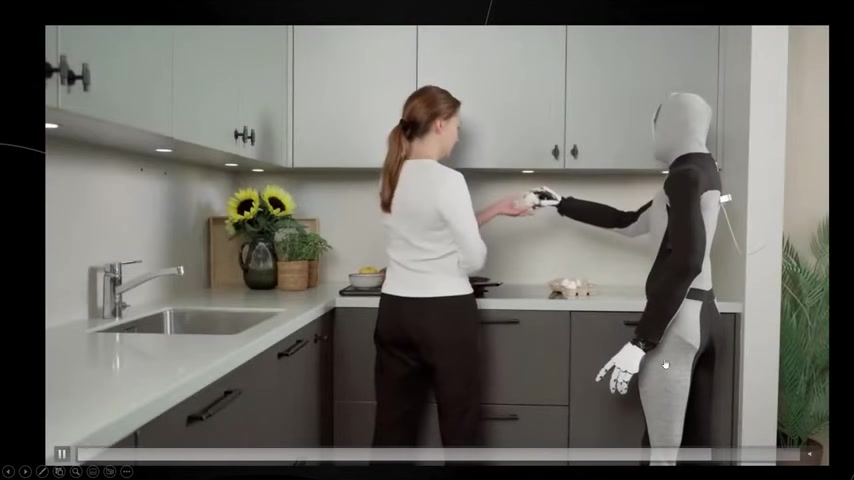
Now later on , in this short demo , one of the things that I really liked was we did get to see Neo interacting with certain objects that require a level of delicacy and precision that mimics the subtlety of human touch .
Robots must be capable of exerting the , you know , just right amount of force and not too much force .
Because if it's too much force , it's going to crush the egg , and if it's too little force , then it's going to drop the egg .
So this involves sophisticated sense of feedback , advanced algorithms that allow for adaptive manipulation .
And achieving this balance is actually quite complex , and it requires a combination of sensitivity , nuance control , and real time decision making that even state of the art robotic systems find difficult to replicate .
However , we can see that Neo manages to do this task quite effortlessly .

And I think this demo perfectly highlights that , yes , this is actually a robot and not a human in a costume , considering we can see that there is this harness that the robot is in , showing us that it's connected to something else .
Now if you do head on over to the Neo web page , we also do get to see this demo right here .
And I think this one is probably a little bit even more fascinating because we see Neo in a range of different tasks that most humans are currently engaged in on a day to day basis .
Now , the reason I like this video a lot more is because we do see certain tasks that require a level of precision and not only that , but a level of strength that I think is going to be needed in humanoid robots .

The first clip that we do see is Nio being able to grab a mountain bike , and then , of course , in fact , not a mountain bike , looks like a racing bike , and then , of course , pick it up , which is showing us just exactly how strong this humanoid robot is going to be .
The next scene that we do get after the bike scene is Neo being able to wipe up some crumbs or some mess , but the scene that I do want to focusing on is Neo actually managing to pour the cocoa beans into the coffee machine .
And the reason that I think this one is so impressive is because having a humanoid robot that's able to do these tasks , they do require a level of precision that most humanoid robots do struggle with .

The problem with , you know , a lot of humanoid robots is that when you're trying to generalize certain tasks , it becomes harder with tasks that require a lot more precision because the degree of error that robots have to try and account for is really , really thin on tasks like these where you have to really get everything precise or the task is going to fail .
For example , slot inserting things in , you know , tasks that humans would find incredibly easy .
These tasks for robot that they would find extraordinarily hard given the level of complexity that the system currently operates at .
Now , many people have questioned if these robots are going to do the big thing , which is , of course , walking .
And the CEO did say that our approach to walking is fully learned all the way down to talks .
And , basically , I'm gonna explain to you guys this entire statement .

So they said that this means that this robot's walking ability is entirely based on machine learning rather than pre programmed movements and the learning process goes down to the level of controlling the torque , which is the rotational force in each joint .
And this approach allows for a more adaptable and more natural movement .
Now it does mention that this is still , of course , a work in progress , and whilst they're acknowledging that they've made , you know , significant progress , the walking capabilities are still not yet perfected and are still being improved .
Although I do think they do look pretty cool .
Now it does say that the goal is to have it walking and as running as efficient as natural as a human by the end of the year .
And this actually sets an ambitious target for the robot's locomotion capabilities , and this statement actually highlights one x capabilities and commitment to creating highly advanced humanoid like robotic movement using cutting edge machine learning techniques .
And it also shows the ambitious timeline for achieving human level locomotion capabilities in their robot .
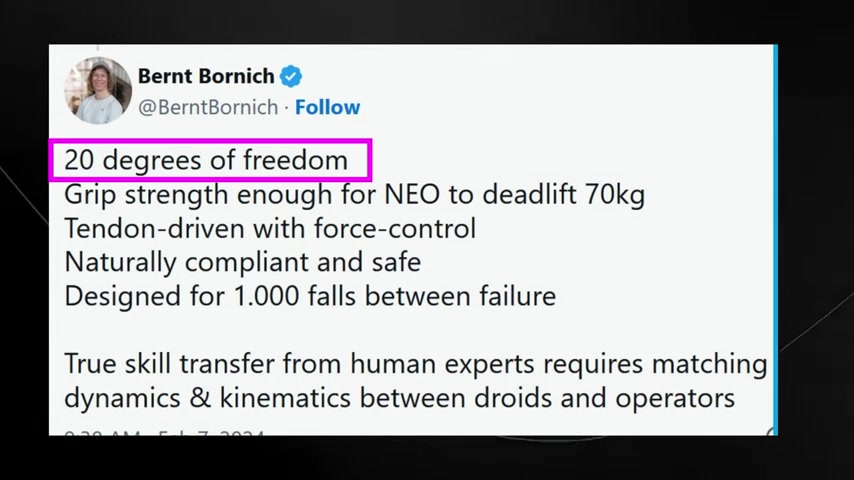
Founder did also state some other things on Twitter that you might want to be aware of .
He said 20 degrees of freedom , and this refers to the number of independent movements or joints the robot has .
More degrees of freedom allow for more complex and human like motions , the grip strength enough for Neo to deadlift 70 kilograms .
The robot's hands are strong enough to lift about 70 kilograms which is around £154 in a dead lift , which is quite impressive for a humanoid robot .
Now tendon driven with force control , the robot uses a tendon based system similar to human muscles and tendons for movement with precise control over the force applied , and this allows for more natural and adaptable movements .
He then states that it is naturally compliant and safe , and this means that the robot is designed to be flexible and yield when interacting with its environment or humans , making it safer to work alongside peep .
Now it says designed for a 1000 falls between failure , which indicates high durability , and the robot can withstand up to a 1000 falls before experiencing a significant failure showing its robust .
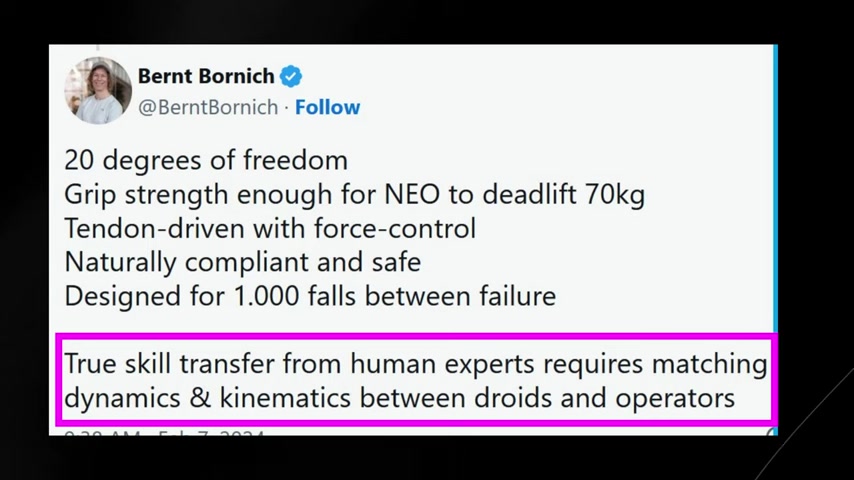
Now true skill transfer from human experts requires matching dynamics and kinematics between droids and operators .
Now what they mean by this statement is that the robot's movement and dynamics and joint configurations , the kinematics , basically , need to closely match those of humans and this basically allows for accurate replication of human skills and movements .
Now I do know that like I said at the start , some people were speculating on whether or not this was actually a human in the suit , but , of course , like I said before , even though there was this post that was going around saying that there's no way an actor needed for robotics demo , the community notes shows us that this is fake and this is actually a humanoid robot .
So let me know what you think about this advanced humanoid robot .

Do you think it's going to be interesting that in the future , future AI systems , GPT 5 , GPT 6 might be completely embodied by humanoid robots , thus allowing them to engage in a variety of different tasks .
Now if you enjoyed this video and you simply cannot get enough of 1 x robotics neo , you can actually check out the first episode of season 2 s 3 , which is a online documentary series from Jason Carman where he does in-depth interviews with the innovators of our time .
It's a 20 minute video that actually goes behind the scenes on what actually Neo is , so I think you guys would all enjoy
Original video
Partnership
Are you looking for a way to reach a wider audience and get more views on your videos?
Our innovative video to text transcribing service can help you do just that.
We provide accurate transcriptions of your videos along with visual content that will help you attract new viewers and keep them engaged. Plus, our data analytics and ad campaign tools can help you monetize your content and maximize your revenue.
Let's partner up and take your video content to the next level!
Contact us today to learn more.